由莱斯大学和亚利桑那大学研究人员共同开发的一项新型计算成像技术,能够将墙壁、家具甚至衣物等日常无光表面转变为虚拟显示屏幕,使机器以超乎寻常的速度和精度重建三维场景。这项成果发表在《自然·通讯》期刊上,直指当前机器视觉系统的一个关键缺陷——无法准确捕捉同时包含无光和反射物体的动态环境。研究团队通过将激光投射到非反射表面上,并配合高速神经形态事件相机,记录光强度变化而非完整图像帧,从而在挑战性光照条件和移动目标下大幅提升性能。这一突破或将为自动驾驶、工业检测、面部识别及人体感知等领域带来深远影响。
颠覆现有技术的成像方法
目前大多数三维成像系统依赖结构光技术,即向场景投射特定图案,通过测量图案在物体表面的变形来生成深度图。然而这类系统在面对运动物体、强烈光照或混合反射表面时往往表现不佳。在同时存在无光和镜面材质的场景中,光线在表面间反复弹跳会扭曲测量结果,降低图像质量。新方法巧妙地将这些原本造成干扰的表面——无光墙壁、衣物和家具——重新利用为虚拟屏幕,使投射的激光点能够反射到光泽物体上,从而绕开了传统技术的限制。
偏折测量法的创新应用
莱斯大学乔治·R·布朗工程与计算学院电气与计算机工程系主任阿肖克·维拉拉加万(Ashok Veeraraghavan)介绍,团队借鉴了计算机视觉中一项成熟技术——偏折测量法,即通过观察投射光图案在反射后的变形来测量光滑表面的形状。传统偏折测量法需要大型且精确定位的专用屏幕,成本高昂且缺乏灵活性。新方案将激光直接投射到场景中已有的无光表面上,彻底消除了对专用设备的需求,使任何房间都能成为功能完整的成像环境。
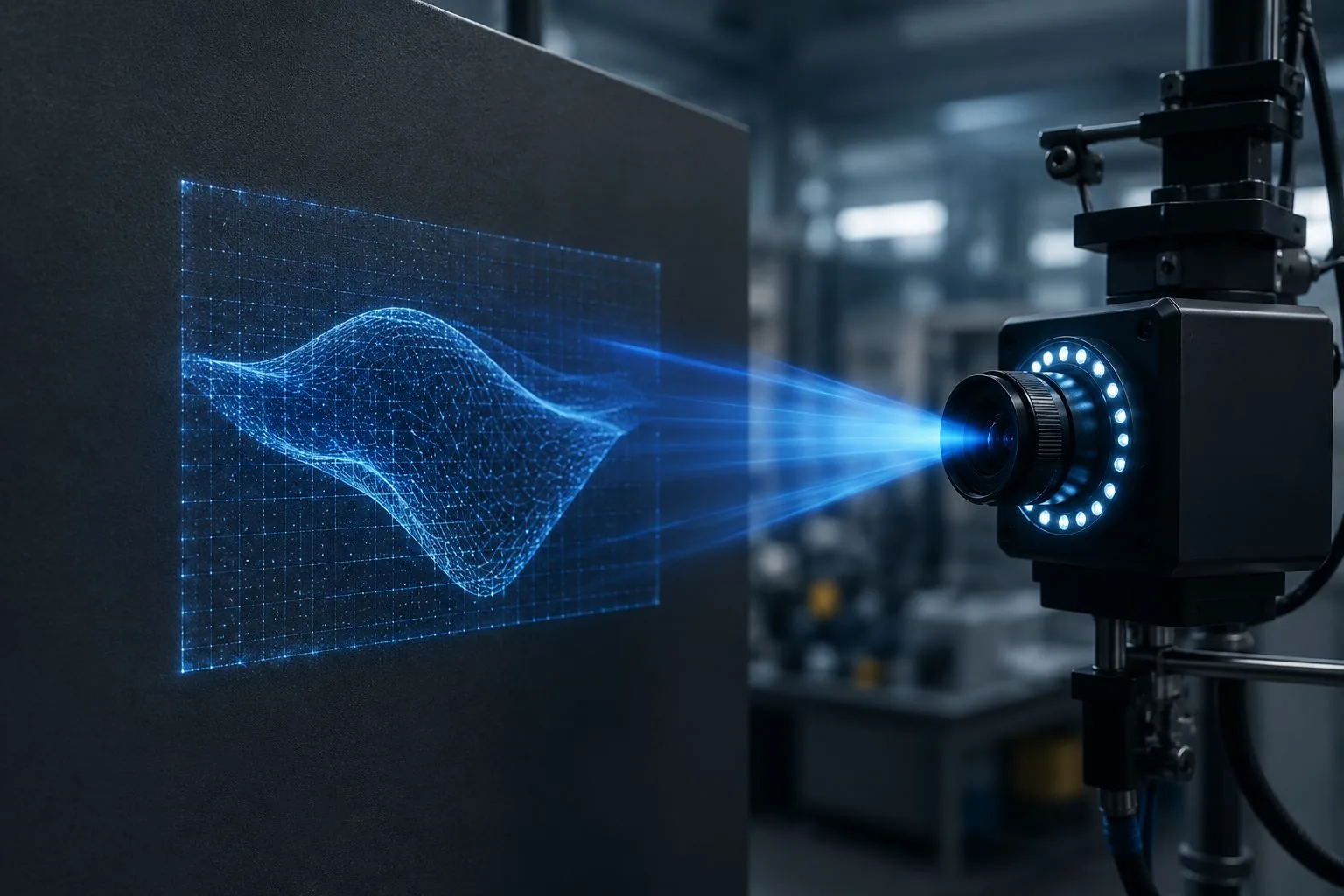
系统工作原理:激光扫描与神经形态传感
整个成像过程分为两个步骤。首先,激光扫描墙壁、衣物和家具等无光表面,生成这些表面的精确三维地图。当激光点从光滑物体上反射时,周围的无光表面便被系统巧妙转化为虚拟显示屏幕——该研究的第一作者、维拉拉万实验室研究生阿尼凯特·达什普特(Aniket Dashpute)这样描述这一过程。第二步,一台神经形态事件相机开始工作。这种相机不捕捉完整的图像帧,而是记录光强度的变化,从而重建高速三维视频。
高速事件相机的关键作用
论文第二作者、亚利桑那大学怀恩特光学科学学院博士后研究员王佳璋(Jiazhang Wang)指出,这种事件相机能够处理从极暗到极亮的不同光照水平,使场景中的所有物体表面无论反射率差异多大,都能以同样高的精度和速度被测量。激光扫描与事件成像的结合是对传统三维传感方式的重大革新。普通相机在快速运动或极端光照对比下会不堪重负,而事件相机只捕捉变化,大幅降低了数据负载并提高了时间分辨率。这使得该系统尤其适合对实时性要求极高的应用场景,每一毫秒都至关重要。
从实验室到真实世界的广阔前景
这项进步有望在多个高风险领域改变机器视觉的格局。对于自动驾驶汽车而言,在混合光照和复杂反射条件下准确感知行人、其他车辆及道路表面是安全行驶的关键。在工业检测中,制造商可利用该技术检测光滑金属零件或透明表面上传统扫描仪难以发现的缺陷。面部识别系统能在多样环境下获得更稳健的深度感知,而手势识别或健康监测等人体感知应用则能受益于该方法的快速与精确。尽管目前该技术仅在桌面实验室条件下得到验证,研究人员强调其原理具有天然的可扩展性。合作者、亚利桑那大学怀恩特光学科学学院副教授弗洛里安·维洛米策(Florian Willomitzer)解释说,可扩展性是三维成像的基本要求。同样的方法未来或可被用于测量手术中的微小反射血管,或者数字化整栋建筑,展现出从微观到宏大尺度的灵活适应能力。